Sensor fusion
This page documents the sensor fusion configuration.
Configuration file fields
This section is autogenerated from the Rule Schema file.
Sensor fusion gnss.sensor_fusion
Combines GNSS and IMU data for improved navigation performance particularly in places with poor GNSS signal conditions. Uses an automotive sensor fusion model. Requires an accurate IMU alignment configuration.
Type |
Default |
Options |
|---|---|---|
integer |
0 |
Disable: |
Configuration explained
This section contains additional information and examples.
The CANedge2 GNSS supports automotive sensor-fusion, combining GNSS and IMU data for improved navigation performance - particularly in places with poor GNSS signal conditions.
Warning
Sensor-fusion can only be used in automotive applications[1]
Sensor-fusion requires careful configuration of the IMU-alignment angles[2]
Example
In this example, two CANedge devices are installed in a passenger car with the IMU-alignment angles carefully configured. One device is configured with sensor-fusion disabled (off) and the other with sensor-fusion enabled (on).
To demonstrate the effect of sensor-fusion, the vehicle is driven through an underground garage (no GNSS signal). Below Figure illustrates how the device with sensor-fusion enabled (on) is able to estimate (dead-reckoning) the route through the garage without any GNSS signal. Contrarily, the device with sensor-fusion disabled (off) is not able to generate any positioning data while inside the garage.
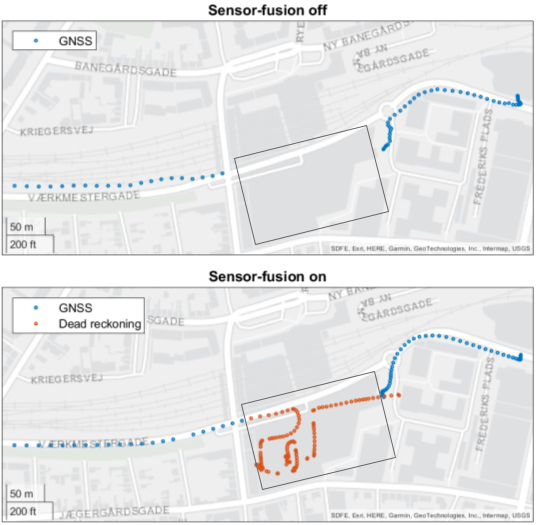
Position of garage marked by a black rectangle. Vehicle enters garage from the left and exits to the right.