Using the CANmod with your CANedge
In this section we explain how you can use your CANmod and CANedge devices together.
Table of Contents
Connect one CANmod to your CANedge
The simplest way to connect your CANmod to your CANedge is as follows:
- Load your CANedge Configuration File via the config editor
- In
2ND-PORTtab click the+button - In the
CAN CH2tab, ensure theModeisRestrictedorNormal - In the
CAN CH2tab set theBit-rate configuration modetoBit-rate (simple) - Set the bit-rate to
1M/4M(CANmod.router) or250K(other CANmod devices)[1] - Connect the CANmod to the CANedge 2nd port[2]
- Ensure the CANmod CAN termination is enabled
Note
We recommend using our DB9-DB9/DB9 adapter to connect the CANedge to CANmod(s)[3]
Connect multiple CANmod devices to your CANedge
You can easily connect multiple CANmod devices to the CANedge[4].
- Follow the same steps as for a single CANmod device[5]
- Configure your CANmod devices to ensure they all output unique CAN IDs
- Update your CANmod DBC file to incorporate the configured CAN IDs
Record 2 x CAN plus CANmod data
In some cases you may wish to record data from two CAN buses, while also recording data from one (or more) CANmod devices.
- Configure the CANedge to record data from the two CAN buses as normal
- Configure the CANmod to use the same bit-rate as the CH1 CAN bus
- Configure the CANmod to use unique CAN IDs (i.e. no overlap vs the CH1 CAN bus)
- Disable termination on the CANmod (assuming the CH1 CAN bus is already terminated)
- Connect the CANmod to the CH1 CAN bus in parallel with the CANedge[6]
Note
You can also consider using a CANmod.router to enable 5 x CAN logging
Decode raw CAN frames from the CANmod
The CANmod devices come with DBC files in their Docs/Introduction sections. These can be loaded together with your other DBC files in the CANedge data processing tools.
Demux data from CANmod.router
You can use a CANmod.router with a CANedge to enable the CANedge to record 5 x CAN.
The data on CH2 will by default be ‘muxed’. To ‘demux’ the data onto e.g. CAN 3-6, you can use the MF4 to MF4 converter mdf2mdf. The demuxed file can be loaded and e.g. DBC decoded in other CANedge software/API tools. To enable drag & drop use of the MF4 converter with the demuxing CLI argument, you can create a shortcut as explained in the MF4 converter Docs.
Below example demuxes data from channel 2 ID 0x10 onto channels 3, 4, 5 and 6[7]:
mdf2mdf.exe --muxtp-can2=010#3:4:5:6 -i 00000001.MF4
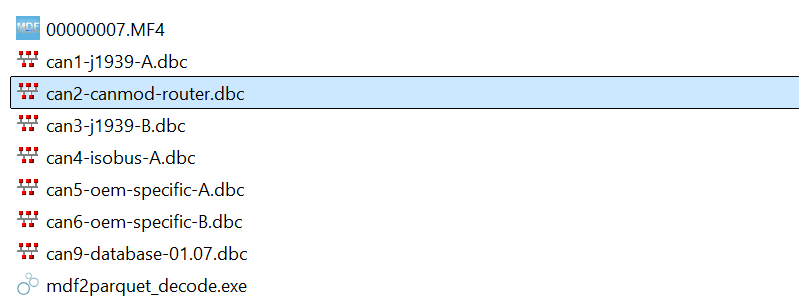
Alternatively, you can use the MF4 decoders to demux and DBC decode your data in one step. To do this, add the CANmod.router DBC file along with your other DBC files as illustrated below[9].
If you use the CANmod.router in a Parquet data lake integration, the same principle applies in how the DBC is added in your input bucket next to the other DBC files.
Use CANmod.gps time to sync CANedge RTC
The CANedge real-time clock (RTC) can be synchronized via a CAN message. This minimizes drift and can be useful e.g. in ensuring that the RTCs of multiple CANedge units stay in sync.
The CANedge Docs contain a detailed example on how to configure this. For a ‘quick start’ you can use below partial config file, which you can load via the partial config loader tool. This config assumes you’re using the default CANmod.gps CAN IDs and syncs the CANedge RTC based on the CANmod.gps Epoch signal when TimeConfirmed is true[8].
FW 01.09, RTC CAN sync 'partial config'
| [1] | The CANmod.router uses 1M/4M CAN FD by default on the primary CAN. Other CANmod devices use the 250K bit-rate as default, which matches the default for the Bit-rate standard field of the CANedge. If you are using a custom bit-rate on the CANmod, you should update the CANedge bit-rate accordingly. Note that the CANedge ‘bit-rate auto detection’ feature does not work if a single CANmod is connected on CAN CH2 |
| [2] | The CANmod termination is enabled by default, see also the CANmod Docs. The switch below the DB9 connector should be turned to the Ohm symbol |
| [3] | If you use 3rd party adapter cables, ensure that the pinout is correct (this is not the case for many 3rd party DB9 adapter cables) |
| [4] | There is in principle no limitation on the number of CANmod devices you can daisy chain from a CAN bus perspective - as long as you manage busload and uniqueness of the CAN IDs. However, if you use the CANedge 5V power supply, we recommend connecting a maximum of 10 CANmod devices on the 2nd port. If you need to connect more than this, we recommend to instead use an external power supply. |
| [5] | To daisy chain multiple CANmod devices, you can e.g. use multiple DB9-DB9/DB9 Y-splitter cables |
| [6] | This can e.g. be done via a DB9-DB9/DB9 adapter as per pictures on the CANmod product pages |
| [7] | You can find more demuxing examples in the MF4 to MF4 converter documentation |
| [8] | Using a GNSS based Epoch signal enables high-precision RTC synchronization and will result in far more precise synchronization vs. e.g. network-based RTC synchronization |
| [9] | The DBC assumes you connect the CANmod.router to the CANedge CH2 with default configuration. If you deviate from this (e.g. by using customer CAN IDs for the muxed data or daisy chaining multiple routers), then the DBC must be updated accordingly. |